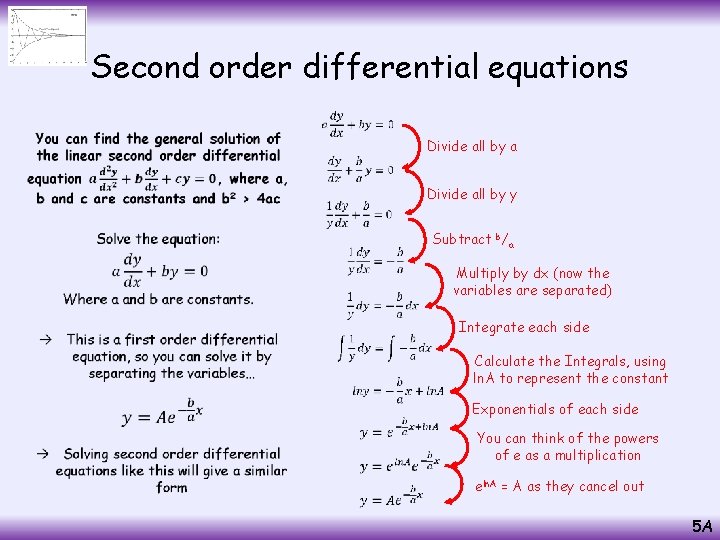
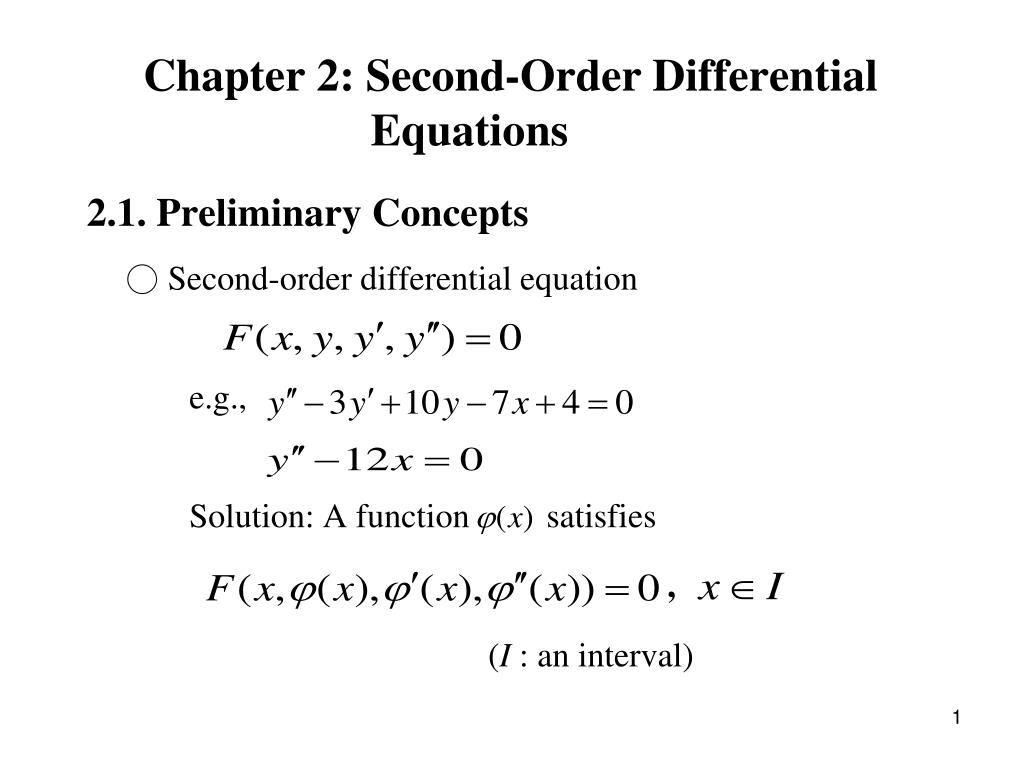
General Solution Of Second Order Differential Equation
Ever feel like your life is a bit of a rollercoaster? One minute you're cruising along, the next you're plummeting down a dramatic dip, only to swing back up just as unexpectedly. Well, turns out that feeling, the one where things change based on how they were just before, is pretty much the essence of what mathematicians call a second-order differential equation. Sounds fancy, right? But stick with me, because it's actually about the rhythm of life, the wobble of a wobbly chair, and why your morning coffee might spill when you make a sudden move.
Think about it. If you're just walking, your position changes based on your speed. That's a first-order thing – the speed dictates where you go. But a second-order equation? That's when your acceleration comes into play. It's not just how fast you're going, but how quickly your speed is changing. Like when you slam on the brakes in your car, or when a toddler suddenly decides to run in the opposite direction of where you were going. That sudden change in speed? That's the acceleration, the driving force behind a second-order equation.
Imagine you're trying to balance a broomstick on your finger. It's not just about keeping it perfectly still. It's about constantly making tiny adjustments. If it starts to tilt one way, you move your finger that way. If it starts to tilt the other, you correct again. That constant back-and-forth, that reaction to a reaction, is the heart of what these equations are trying to describe. It’s the dance of a nervous waiter carrying a tray full of drinks, or the subtle nudges you give your steering wheel to keep your car from drifting into the next lane.
So, what's the "general solution" part of all this? Well, think of it like having a master key. Instead of having to figure out the exact sequence of nudges for that broomstick every single time, the general solution gives you a blueprint. It's a framework that lets you plug in the specific details of your situation – how heavy the broomstick is, how steady your hand is, how much of a hurricane is blowing through your living room – and it spits out the general way the broomstick will behave. It’s the recipe that works for almost any cake, not just your grandma's special chocolate fudge.
Let's get a bit more concrete, but still keep it light. Consider a spring. You pull it, and it snaps back. If you pull it harder, it snaps back harder. Now, what happens if you just pull it and let go? It oscillates, right? It goes back and forth. That back-and-forth motion, that vibration, is a classic example of a second-order differential equation in action. The position of the end of the spring is changing, and the rate at which its speed is changing (its acceleration) depends on where it is and how fast it's moving.

The general solution for this spring problem would describe all the possible ways that spring could oscillate. It might be a gentle, slow sway, or a frantic, rapid jiggle. It depends on how much you stretched it initially (that's your starting condition) and maybe if you gave it a little push (another initial condition). The general solution is like the instruction manual for all possible spring movements, from a sleepy worm wiggling to a hyperactive flea doing cartwheels.
Now, not all second-order differential equations are as simple as a spring. Some are more like trying to predict the path of a rogue bowling ball on a very uneven bowling alley. There are bumps, dips, and maybe even a rogue squirrel that the ball has to dodge. The math gets a little more intricate, but the core idea remains the same: the future state depends on the current state and how it's changing. It’s like trying to figure out where your dog is going to run next. You know where he is now, you know he’s got that boundless energy, and you know he’s probably going to chase a squirrel if one appears. That combination of factors – position, speed, and a general tendency to go wild – is what a second-order equation tries to capture.
The "general solution" is essentially a family of functions. Think of it like a large extended family. You've got the main characters – say, the sinewave-y ones and the exponential-y ones (don't worry, we'll get to those briefly). These are like the grandparents and the parents. Then, by adding specific constants and parameters, you can create all the unique individuals in that family – the cousins, aunts, uncles, and the eccentric great-aunt Mildred who only communicates through interpretive dance. These constants are your initial conditions, the unique flavor that makes each particular scenario stand out.
Let's talk about the "building blocks" of these general solutions for a common type of second-order equation – the linear, homogeneous ones. These are the ones that describe systems where the forces involved are proportional to the displacement or velocity, and there are no external "pushes" or "pulls" from outside the system itself. Think of our spring again, but without someone randomly kicking it. The two main "building blocks" you'll often see are trigonometric functions (like sine and cosine) and exponential functions.
Sine and cosine? Yep, those are the ones that make things go round and round, or back and forth in a nice, predictable wave. They're perfect for describing anything that oscillates. Your car's suspension system? Trying to smooth out the bumps? That's sine and cosine at work. The way a pendulum swings? You guessed it. It’s like the steady heartbeat of a well-behaved system. They create smooth, repetitive patterns, the kind of thing you'd see in a beautifully choreographed dance.
Exponential functions? These are the ones that either grow incredibly fast or decay to nothingness. Think of a rumour spreading through an office – it starts small and then, bam, suddenly everyone knows. Or, on the flip side, think of a hot cup of coffee cooling down. It starts hot, and then gradually, inevitably, it reaches room temperature. Exponential functions describe these kinds of uncontrolled growth or decay. They can be a bit more dramatic, the rollercoaster’s steep climb or its sudden drop. They can represent things like population growth (hopefully not too much growth!) or the discharge of a capacitor.

So, the general solution for many of these second-order equations is a combination of these building blocks. It's like mixing flour, sugar, eggs, and butter. You can adjust the proportions to get different kinds of cakes. In our case, you combine sine, cosine, and exponential functions in specific ways, with those crucial constants, to describe a vast array of behaviors. It might be a damped oscillation (a spring that bounces but eventually settles down), or an oscillation with increasing amplitude (a spring that, for some reason, keeps bouncing higher and higher – probably not a good sign!).
Why are these general solutions so useful? Imagine you're trying to design a bridge. You don't want it to collapse when a strong wind blows, right? Or when a truck drives over it. Engineers use differential equations, and their general solutions, to model how the bridge will respond to different forces. They can plug in the materials, the dimensions, and the expected loads, and the general solution helps them predict the bridge's behavior. It's like having a super-powered crystal ball that tells you, "Yep, this bridge will hold," or "Uh oh, might want to reinforce this section a bit more." They're not just guessing; they're using the fundamental laws of physics, expressed through these equations.
Think about your car's anti-lock braking system (ABS). When you slam on the brakes, the wheels might start to lock up, making you skid. The ABS rapidly pulses the brakes – on, off, on, off – to prevent that. That pulsing is a very clever application of controlling second-order behavior. The general solution for the physics of a wheel and tire under braking helps engineers design that precise pulsing mechanism. It's all about managing that rate of change of change to keep you safe and in control.

So, the next time you see a pendulum swinging, hear a spring boinging, or feel your car smoothly handle a bumpy road, remember the humble second-order differential equation. It’s the unseen architect behind so much of the predictable (and sometimes unpredictable) motion around us. And the general solution? That's just the master plan, the universal blueprint that helps us understand and even control the dynamic dance of the world.
It’s not just about abstract math problems in a dusty textbook. It’s about the swing of a child on a playground, the hum of a vibrating guitar string, the graceful arc of a thrown ball. These are all phenomena that, at their core, are described by the principles of how things change based on how they were just changing. The general solution provides that overarching understanding, that ability to look at a specific instance and say, "Ah, I see how this fits into the bigger picture." It’s like learning the basic rules of grammar and then being able to understand and even create countless different sentences. The general solution is the grammatical structure of motion.
And the beauty of it is that once you have that general solution, you can then tailor it. You can pick your specific sine wave frequency, choose your particular exponential decay rate, and set your initial conditions. It's like having a chameleon that can change its colors to match any environment. The general solution is the chameleon's full genetic code, and the specific solutions are all the amazing patterns it can create. It's a powerful tool for understanding everything from the grandest cosmic movements to the tiniest mechanical vibrations. It’s the secret language of how things move and change, and the general solution is how we get to eavesdrop on that conversation.